

Materi Grafika Komputer Pertemuan Ke-3
SYNTHETIC CAMERA

SYNTHETIC CAMERA
Proyeksi perspektif dengan mata berada di
sumbu proyeksi sangat membatasi sudut
pandang.
Memutar objek agar memperoleh sudut
pandang yang berbeda sangat tidak efisien.
Pendekatan lain adalah dengan
menggunakan synthetic camera
CARA KERJA CAMERA

Citra objek dibawa cahaya menuju lensa sehingga di lensa muncul
bayangan objek, oleh cahaya bayangan tersebut kemudian
diteruskan ke film (plastik yang dilapisi dengan bahan kimia peka
cahaya) sehingga menimbulkan reaksi kimia yang membentuk
citra objek
SYNTHETIC CAMERA
Synthetic camera adalah metoda memposisikan
‘camera’ untuk melihat benda.
Membutuhkan tiga komponen :
Bidang proyeksi
Sistem koordinat viewer
mata.
Cara kerja : objek dipindahkan ke koordinat viewer
dan kemudian 'bayangan' objek diproyeksikan
perspektif.
Objek perlu dipindahkan ke koordinat viewer agar
posisi objek sesuai dengan (align) arah mata.

Viewing coordinate sering juga disebut
sebagai UVN system.
Sistem koordinat UVN mempunyai tiga
sumbu :
U
V
N
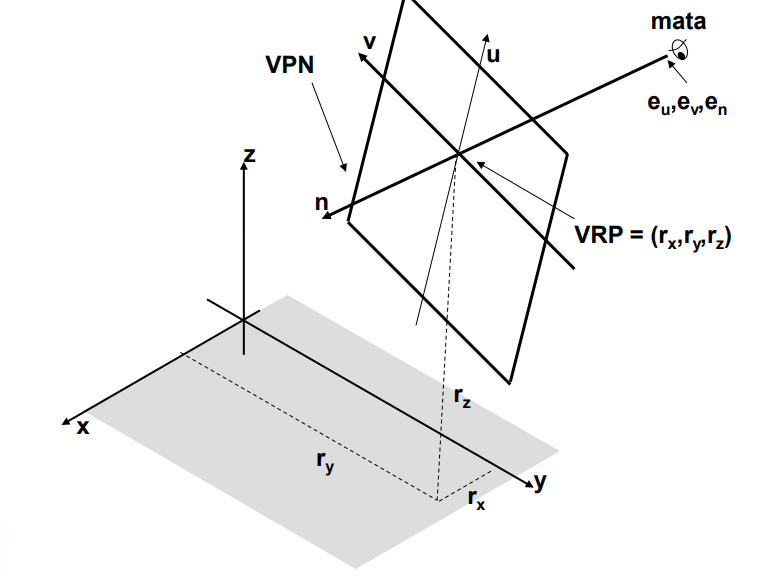
Viewing coordinate diperoleh berdasarkan
informasi mengenai :
posisi kamera pada world coordinate, posisi ini disebut
juga sebagai VRP (Viewing Reference Point).VRP
ditentukan berdasarkan vector r = (rx
, ry
,rz
)
Arah viewplane, disebut sebagai VPN (Viewplane
Normal) dan ditentukan berdasarkan vector n (nx
,ny
,nz
).
Vector n ditentukan berdasarkan world coordinate.
Arah sumbu V ditentukan berdasarkan vector u. Vector
u bersifat tegak lurus terhadap n dan v.
posisi mata (eye) ditentukan dalam viewing coordinate
dan disimbolkan dengan e = (eu
,ev
,en
). Umumnya e
berisi (0,0,E)
Bagaimana menghitung n,v dan u?
Pemakai dapat menentukan nilai n dengan
memasukkan vector norm dan vector n dihitung
sebagai :

Untuk memperoleh norm, tentukan titik yang
menjadi pusat pandang camera (look at) dan
kemudian norm dihitung sebagai : norm = scene - r
Vector v ditentukan oleh pemakai
berdasarkan vector up (ux
,uy
,uz
) dan dihitung
sebagai :

Catatan :
tanda • menyatakan dotproduct dua vector
tanda |up’| menyatakan panjang vector up’

Karena vector u harus tegak lurus terhadap n
dan v maka vector u dapat diperoleh dari :

Catatan : n x v menyatakan cross product
TRANSFORMASI WORLD KE
VIEWPLANE
Setiap titik di world coordinate (w) dapat
ditransformasikan ke viewing coordinate (p) dengan
menggunakan rumus :

Setelah titik di world coordinate di transformasikan
ke viewplane maka tahap selanjutnya adalah
melakukan proyeksi perspektif terhadap titik di
viewplane.
PROYEKSI VIEWPLANE
Jika diketahui titik p=(pu
;pv
;pn
) adalah titik di
viewplane dan mata terletak di (eu
;ev
;en
)
maka titik q (u*,v*) sebagai proyeksi
perspektif dari p dapat diperoleh dengan

Apabila e = (0,0,en
) maka rumus di atas
dapat disederhanakan menjadi














0 komentar: